Several months ago, I started collecting parts and designing a circuit board for a
Chirpy XBM-10-2 Transceiver (designed by
Roger - G3XBM). Later, Lyle a member of our local pQRP group, suggested a challenge for the members to build the Chirpy. I did not tell him that I already had one in progress.
But, my progress has been VERY slow due to other projects, and the lack of critical parts (e.g. the 28.06mHz watch crystals). As always, my goal with this project was to build it as small as I can (just for the challenge). The PCB layout was created with
DipTrace and then commercial produced by
DorkBotPDX. The PCB size is 0.7 x 0.9 inches. The boards were received and have been sitting here in my Shop for a while, awaiting for my time to install parts and do a smoke test.
Today was the day for the project build and test.
 |
| As built, the XBM-10-2 |
Some of the circuit components were changed, due to the reduced size and parts on hand. As implemented, the circuit includes the Optional Low Pass Filter, and two 1/8 inch phone jacks. One jack for the Hi-Z Ear Phone, and the other jack serves both as the CW Key Port and Power Switch. The suggested T37-2 Toroid was replaced with a T25-2 to fit in the allocated space between the jacks on the underside of the board. Most of the caps are 0805 (with one 1206), the resistors are 0603's, and of course, two SOT 2N3904 transistors. The Battery Clip is hardwired (it could have been on a header), the Antenna connection is via a two pin header. Mounting is via double sided tape on the side of the 9 volt battery.
Note: the negative side of the battery is connected to circuit ground by inserting the key phone plug. Which if a stereo plug is used, as typically used with a paddle key, the dash key becomes a power switch and the dot key is the CW key (it takes a little getting use to). If a mono plug is used with a straight key, then the power is applied to the circuit by just inserting the key, and results in normal key operation.
So far, I have built two, and each seem to work as expected (and there was NO smoke).
 |
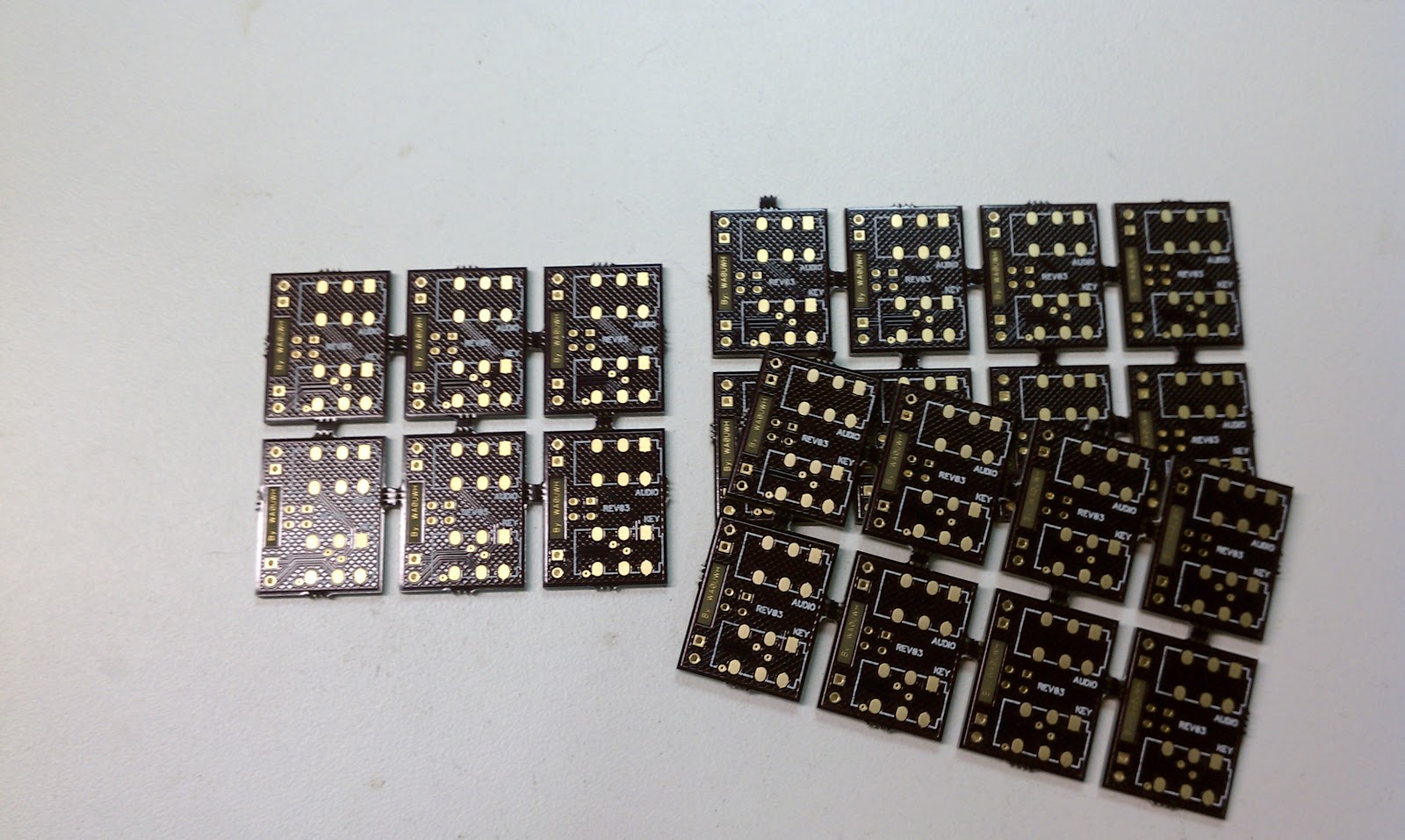
Why So Many Boards,?
Well, . . the PCB Manufactures will not build just one |
I have not used the Transceiver in a QSO yet, but the power out measures 0.3 volts p-p at a 50 ohm dummy load (0.3vpp / 2 × .707)^2 / 50 = 225nW, I would have expected more). The tone sounds good on my general coverage receiver, and not too much chirp.
I can hear a received signal, from my MFJ-269, but the receiver sensitivity has not been measured. The receiver does not seem to suffer from hand capacitance normally experienced with Regen Receivers, maybe that is an advantage of; the circuit design, or the small size of the circuit and board.
With 9 volt Battery appropriate bias, more power and sensitivity may be obtained, note the original circuit was designed for 12 volts. In the next few days more performance data collection, experiments and on-air tests are planned. My friend
Jeff - KO7M has a spectrum analyzer, so the next time we get together I will have a harmonic content report.
Other
implementation of Chirpy can be found via a google search.
Thanks Roger, for this neat "little" Chirpy Circuit Design
And hopefully Roger, you will forgive me for "expanding" the component count with the on-board Low Pass Filter, Key and Audio Jacks, Antenna and Battery headers, and a battery low side by-pass cap.
UPDATE
I have had several requests for boards or kits, the board would require re-lay-out to correct some spacing issues, proper documents would need to be prepared. I am not sure many people would want to build at this scale. I would like to make a kit available, but price and postage would not support much effort for only a few sales.
--